محققان موسسه تحقیقاتی SINTEF در حال بررسی نحوه استفاده از مارهای رباتیک برای جمع آوری نمونه از مکان های غیر قابل دسترس بر سطح مریخ هستند که می تواند به روند اکتشافات مریخ نوردهای مختلف بر سطح این سیاره کمک کند.
این پروژه بخشی از مطالعه امکان سنجی توسط آژانس فضایی اروپا (ESA) است که با هدف تحول در تحقیقات فضایی در مقایسه با مریخ نوردهای سنتی مانند کنجکاوی و فرصت فراهم می کنند.
ناسا تاکنون چهار مریخ نورد رباتیک شامل سوجورنو در سال 1977، روح و فرصت در سال 2003 و مریخ نورد پیشرفته کنجکاوی در سال 2012 میلادی را با هدف بررسی خاک و سنگ و یافتن نشانه های احتمالی حیات راهی سیاره سرخ کرده است.
یکی از چالش های پیش روی محققان، محدودیت قدرت مانور مریخ نورد است، چراکه این کاوشگرهای رباتیک قادر به رفتن به همه مناطق و نمونه برداری نیستند و ممکن است که به سرنوشتی مانند مریخ نورد روح دچار شده و برای همیشه در یک منطقه گرفتار شوند.
در حال حاضر نمونه های خاک یا سنگ های حفاری شده در ابزار تجزیه و تحلیل مریخ نورد مورد آنالیز قرار گرفته و اطلاعات به زمین مخابره می شود.
یک ایده مطرح در این پروژه، حمل ربات مار با کمک مریخ نورد کنجکاوی در مسافت های طولانی و کاوش در مناطق غیر قابل دسترس برای مریخ نورد توسط ربات است.
در کنار آنالیز نمونه های سطحی توسط مریخ نورد، تجزیه و تحلیل دقیق تر نمونه های عمق خاک توسط مار رباتیک انجام می شود؛ ارتباط بین مریخ نورد و مار رباتیک برای تأمین انرژی نیز از طریق یک کابل برقرار می شود.
محققان نمونه آزمایشی ربات مار Wheeko را توسعه داده اند که به انجام مطالعات بر روی سطوح صاف کمک می کند؛ این ربات شامل 10 ماژول مفصلی یکپارچه با دو درجه آزادی حرکت است که با کمک چرخ های سطحی، خزیدن به جلو را امکانپذیر می کند.

نمونه آزمایشی ربات مار Wheeko
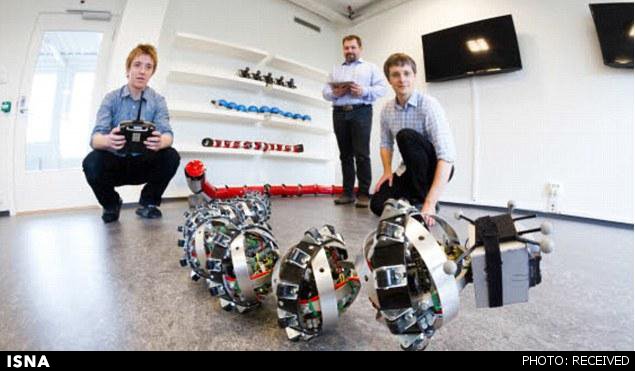
نمونه آزمایشی ربات مار Wheeko
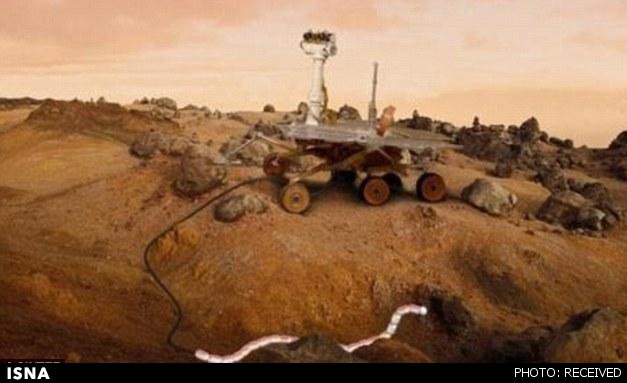
همکاری مشترک ربات مار و مریخ نورد برای تحقیقات زیر و رو سطحی در مریخ
اخبار ویژه

خیالبافی جانکری در والاستریت ژورنال:

عمان دوباره میزبان شد؛


نظرات بینندگان






جدیدترین اخبار پربازدید ها
نیازمندیها
09107726603
تماس یا پیام در پیام رسان های ایتا و تلگرام
